
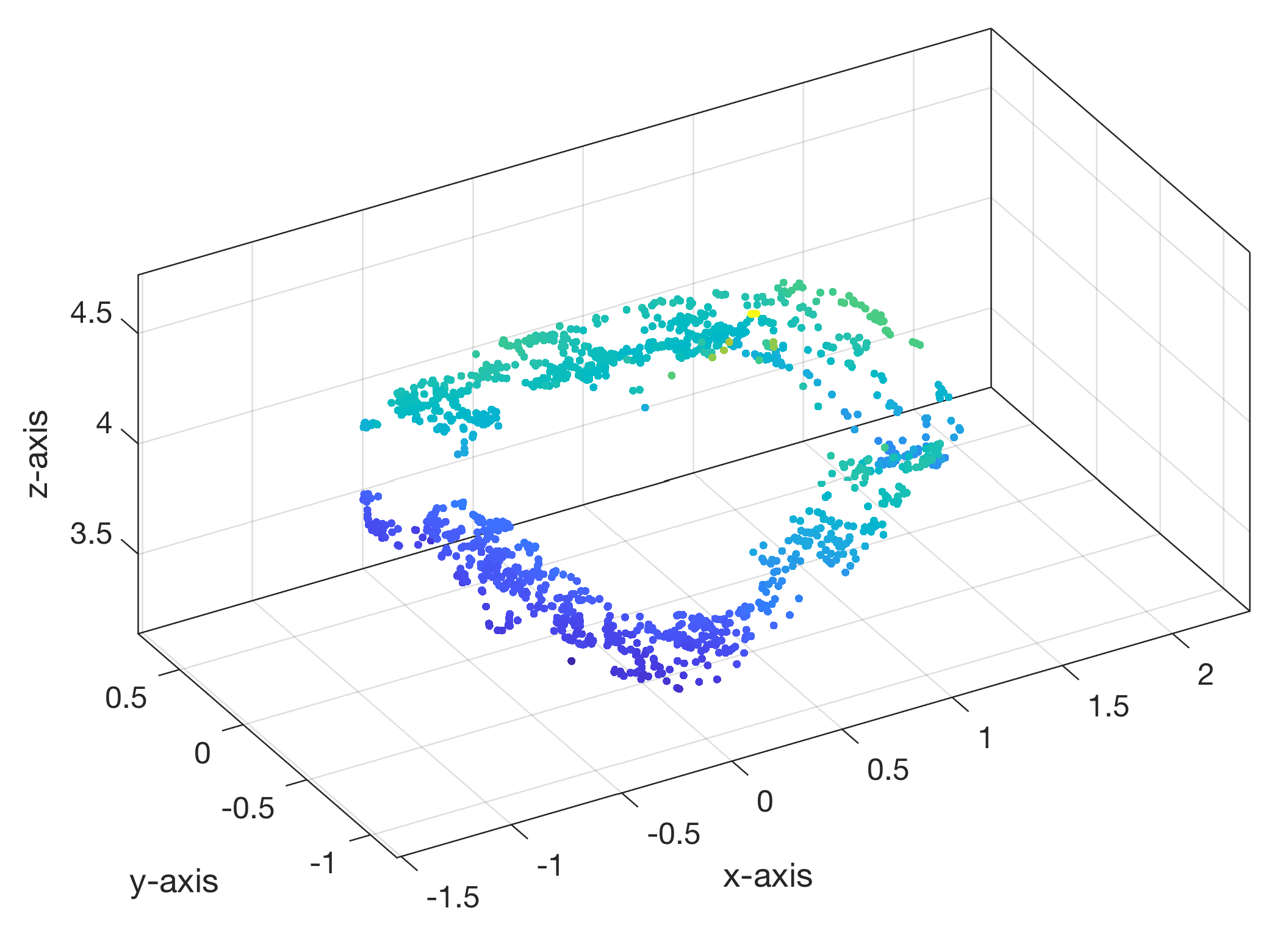
 This exercise is intended to help students to understand how to calculate a 3D point cloud from stereo images. We used a webcam, mounted on a four-wheeled LEGO vehicle on rails with a single large motor, controlled with MATLAB, to acquire pairs of stereo images and calculated the 3D point cloud of the opening of an agate druse.
This exercise is intended to help students to understand how to calculate a 3D point cloud from stereo images. We used a webcam, mounted on a four-wheeled LEGO vehicle on rails with a single large motor, controlled with MATLAB, to acquire pairs of stereo images and calculated the 3D point cloud of the opening of an agate druse.
The exercise, designed by geoinformatics master student Jonas Räsch, shows the usual workflow during the calibration of a camera, the acquisition of stereo images with this camera and the calculation of the three-dimensional geometry of the druse. We used a high-resolution (1920 x 1080 pixels) Logitech C922 Pro Stream Webcam to get the best possible results.
