
This exercise is intended to help students to understand how to determine the impulse response sequence and the frequency characteristic of the LEGO ultrasonic sensor.
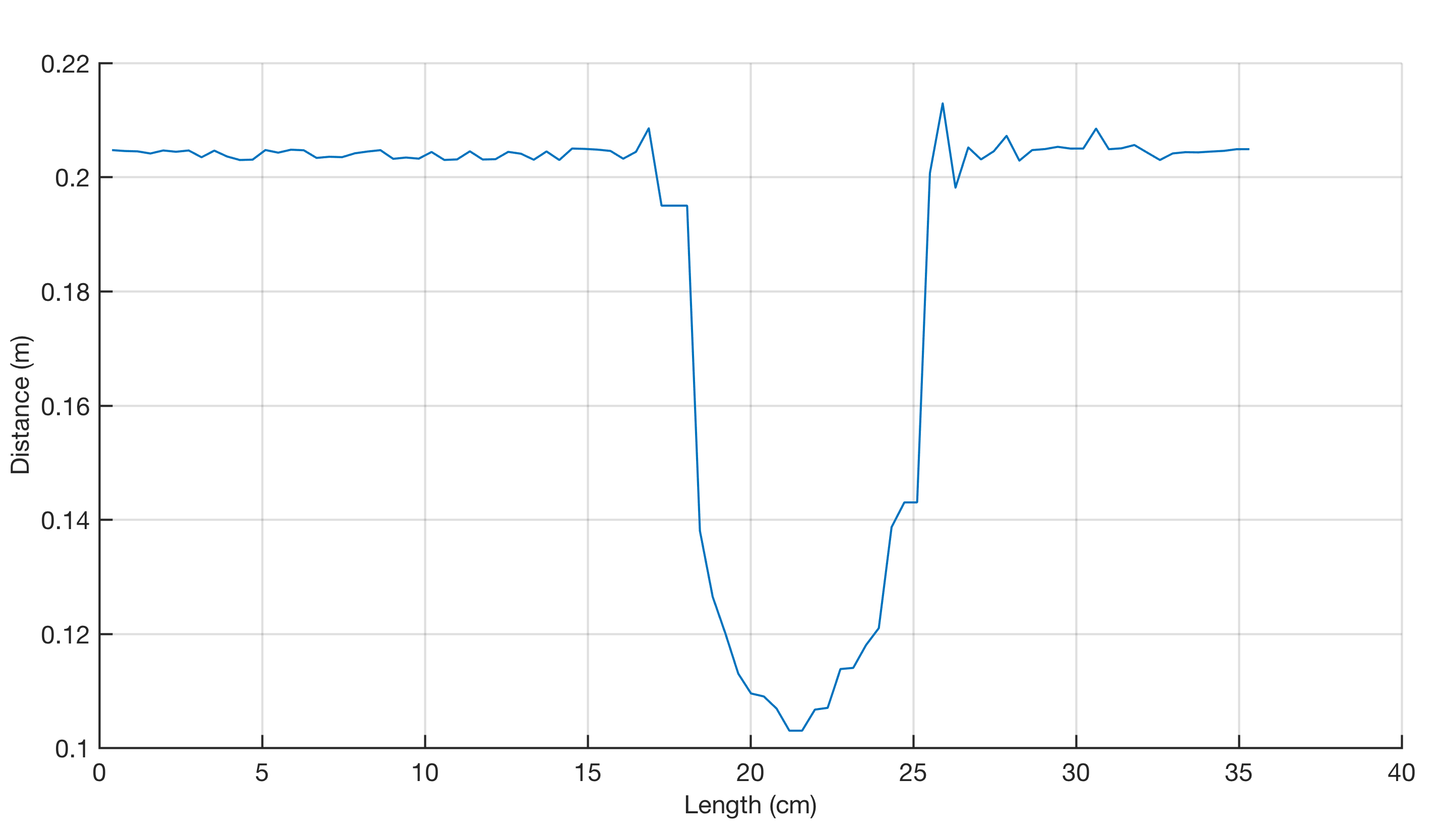
We build a four-wheeled vehicle on rails with a sensor facing to the side. While the vehicle travels along a vertical wall at a distance of 20 cm from the ultrasonic sensor, the sensor constantly measures the distance. Halfway there is a vertical bar with a width of approx. 5 mm. The series of distances is an approximation of the impulse response sequence, the Fourier transforms of the impulse response sequence is the magnitude characteristics of the measuring arrangement. It can be deduced from this that the spatial resolution of the sensor is rather low since it integrates over 90 degree angle.